5 Wheeled robot steering mechanisms
In the field of mobile robotics, steering mechanisms and wheel configurations play a critical role in controlling the movement and maneuverability of wheeled mobile robots. These robots rely on various steering mechanisms and specialized wheel designs to navigate diverse environments and perform specific tasks.
This blog explores five commonly used mobile robot steering mechanisms, including differential drive, Ackermann steering, omni wheels, mecanum wheels, and skid-steering. We will also delve into different types of wheels commonly used in wheeled mobile robots, such as omni wheels, castor wheels, and mecanum wheels. Understanding these steering mechanisms and wheel configurations is essential for optimizing the performance and capabilities of wheeled mobile robots, enabling them to navigate efficiently and effectively in a wide range of applications such as mapping, localization or, simultaneous mapping and localization (SLAM).
Differential Robot Steering
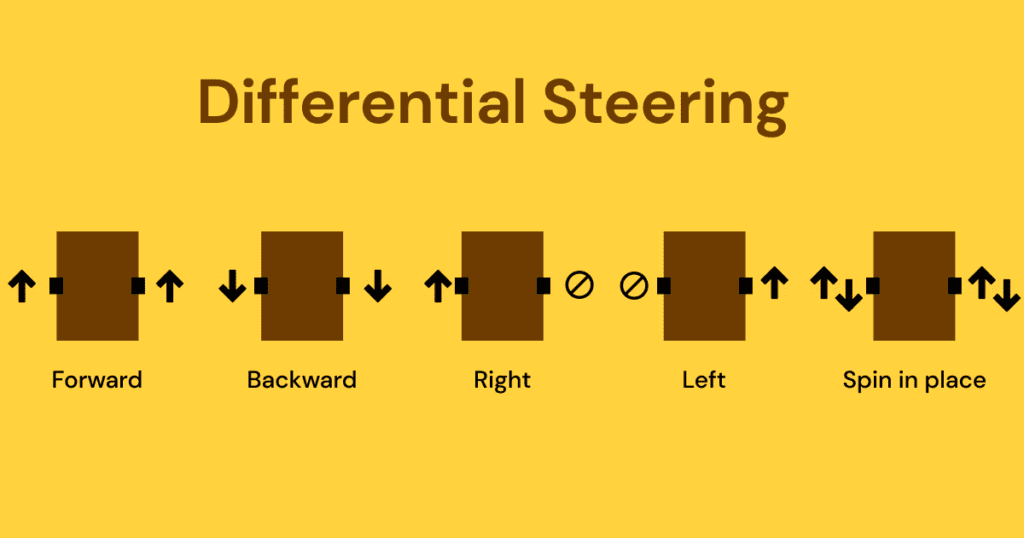
Differential steering is one of the most common steering mechanisms used in mobile robots. It involves controlling the speeds of the left and right wheels independently, allowing the robot to turn by varying the speed of each wheel. This mechanism is simple and efficient, making it suitable for many applications. However, it has limitations in terms of maneuverability and stability. Differential steering works better in open spaces and can struggle with tight turns or uneven terrains.
Ackermann Robot Steering
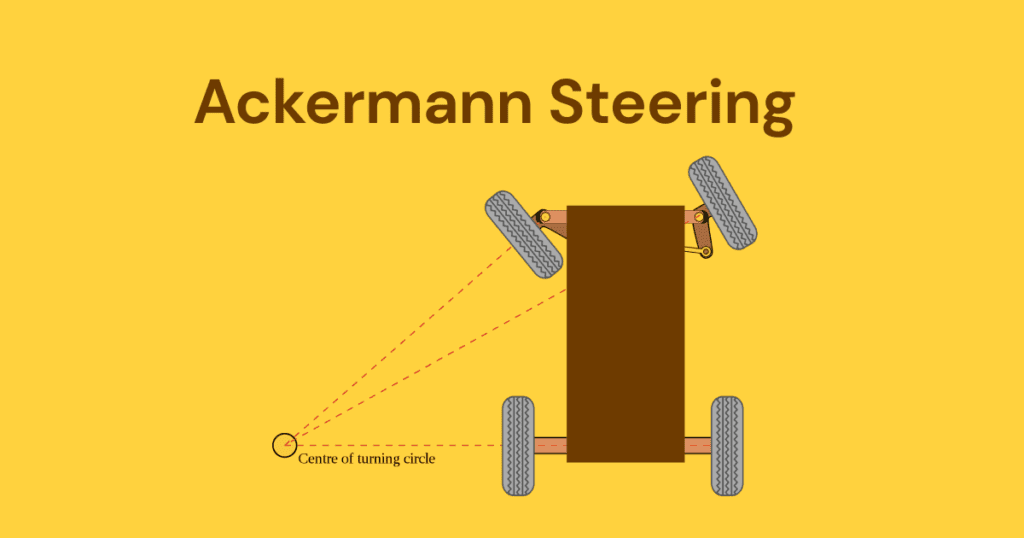
Ackermann steering, sometimes also referred to as Rack & pinion steering, is another popular steering mechanism that provides better maneuverability and stability compared to differential steering. This mechanism uses a steering angle for each wheel, calculated based on the desired turn radius. By adjusting the steering angles, the robot can make precise turns without skidding or slipping. Ackermann steering is commonly used in vehicles such as cars and trucks, where precise steering control is necessary. However, it may not be suitable for all types of mobile robots, especially those with limited space for steering mechanisms.
Skid-Steering
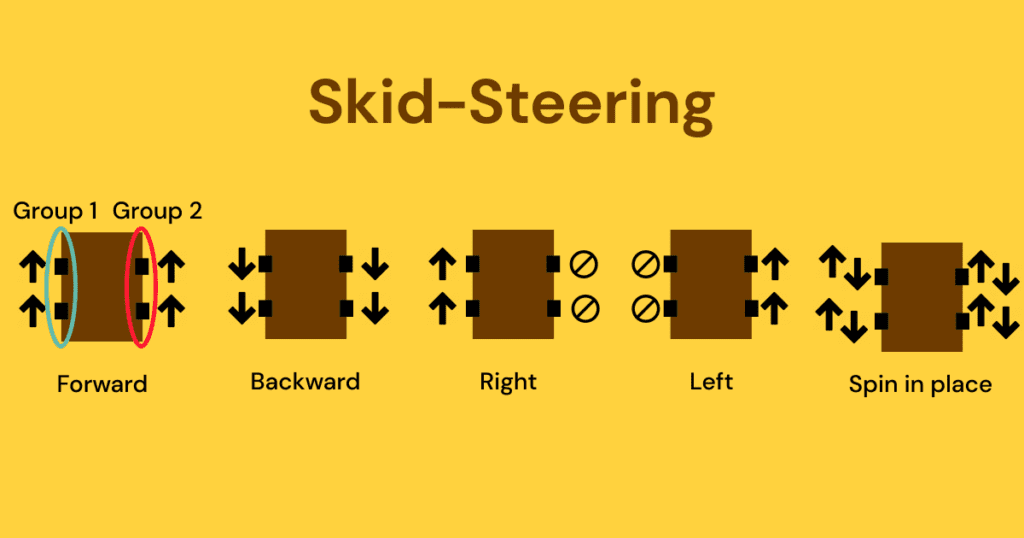
Skid–steering is a mechanism often used in smaller mobile robots. It involves controlling the speeds and directions of the left and right set of wheels (group) independently, similar to differential steering. However, instead of varying the speed of each wheel to turn, skid-steer steering relies on driving the wheels on one side of the robot in opposite directions. This causes the robot to pivot around a point between the wheels, allowing for tight turns and maneuverability in confined spaces. Skid-steer steering is commonly seen in robots like rovers and tank-like vehicles. However, it can be less efficient and prone to slipping on certain surfaces.
Mecanum Robot Steering
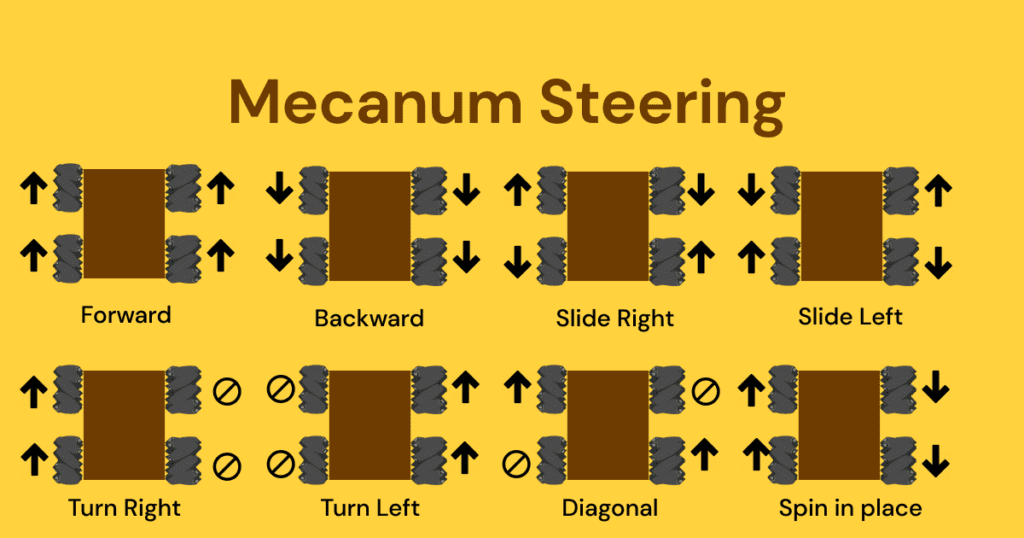
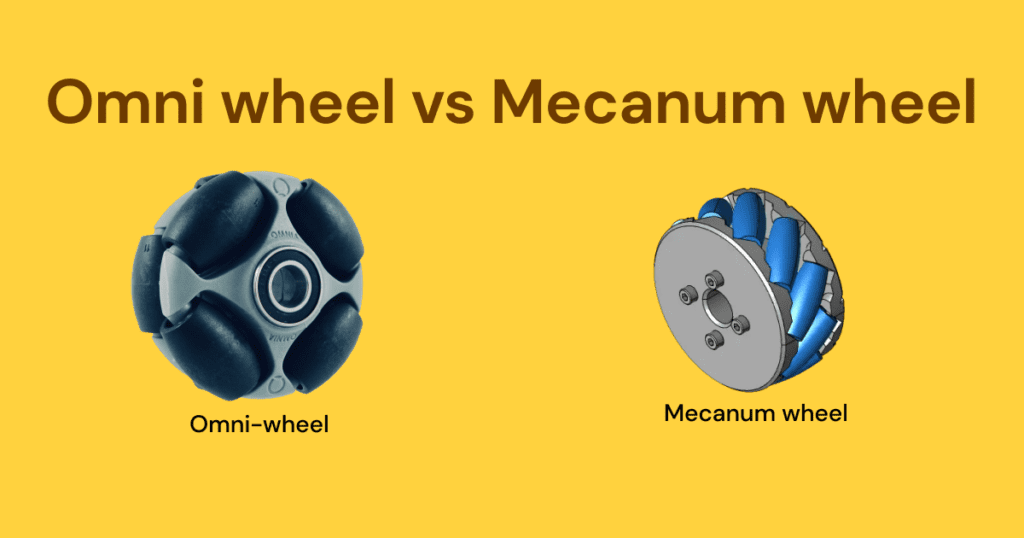
Mecanum steering is a unique and versatile mechanism used in mobile robots. It involves four wheels, each with a set of rollers mounted at an angle making it slightly different from the omni-wheels. By rotating these wheels independently and in different directions, the robot can move in any direction, including sideways and diagonally. This omnidirectional movement capability makes mecanum steering ideal for applications where precise maneuverability is required, such as robotic arms or autonomous vehicles in tight spaces. However, the complexity of the mechanism and the increased number of wheels make it less efficient and more expensive than other steering mechanisms.
Omni-Directional Robot Steering
Omni-directional steering mechanisms offer the most flexibility and versatility in terms of maneuverability. Omni wheels feature small, freely rotating wheels around the main drive wheels, allowing the robot to move in any direction without changing its orientation. This holonomic steering mechanism provides excellent maneuverability, making it ideal for navigating tight spaces and performing agile movements. Omni wheels are commonly used in applications such as warehouse automation, robotic arms, and omnidirectional robots.
Deployment challenges with wheeled robots
When using wheeled robots, one common challenge that arises is wheel slippage and sinkage, which can significantly impact their performance and mobility. Understanding these challenges is crucial for effective deployment and operation of wheeled robots in various environments.
Wheel Slippage
Wheel slippage occurs when the wheels of a robot lose traction and fail to maintain the desired motion. It can happen on slippery surfaces, uneven terrains, or when the robot encounters obstacles. Slippage can lead to inaccuracies in robot localization, reduced maneuverability, and compromised control over the robot’s movements.
To mitigate wheel slippage, several strategies can be employed. One approach is to use wheels with high-friction materials or specialized tire treads that provide better grip on different surfaces. Implementing traction control algorithms can also help regulate wheel motion and optimize the robot’s ability to navigate challenging terrains.
Wheel Sinkage
Wheel sinkage refers to the sinking of wheels into soft or loose terrains, such as sand, mud, or gravel. When the wheels sink into the ground, the robot’s mobility and maneuverability are affected, as the resistance from the terrain increases. This can lead to difficulties in traversing through such environments and may even result in the robot getting stuck.
To overcome wheel sinkage, wheeled robots can be equipped with larger wheels or add-ons like wheel extensions or tracks that distribute the robot’s weight over a larger surface area. By increasing the contact area with the ground, the robot can minimize sinking and improve its ability to navigate challenging terrains.
Mitigating Slippage and Sinkage
Dealing with wheel slippage and sinkage requires a combination of mechanical design considerations, sensor-based feedback systems, and intelligent control algorithms. By integrating real-time sensors to monitor wheel motion, terrain conditions, and slip/sinkage detection, robots can adapt their control strategies to optimize traction and minimize the impact of slippage and sinkage.
Furthermore, advanced navigation techniques, such as simultaneous localization and mapping (SLAM), can enhance the robot’s ability to accurately map and perceive its environment, aiding in avoiding potential slippage and sinkage hazards.
By addressing the challenges of wheel slippage and sinkage, wheeled robots can effectively navigate various terrains and environments, enabling their successful deployment in applications such as search and rescue missions, agricultural automation, warehouse logistics, and many more.
Key takeaways
The choice of steering mechanism for a mobile robot depends on the specific application requirements and design constraints. Differential steering is a simple and efficient choice for basic mobility tasks, but it may struggle with tight turns or challenging terrains. Ackermann steering provides better maneuverability and stability, making it suitable for applications that require precise steering control. Omni-directional steering mechanisms offer the most flexibility but can be more complex to implement. By understanding these different steering mechanisms, designers can choose the most suitable option for their mobile robot and maximize its performance in various environments.
In conclusion, the steering mechanism is a critical component of mobile robots, influencing their movement and capabilities. As technology continues to advance, we can expect further innovations in steering mechanisms, enabling robots to navigate even more complex and dynamic environments. Albeit, challenges like operational range estimation to avoid complete immobilization during the mission still remain.